
Over the past 12 years I’ve worked on over 40 show runs and countless other events, shows and advisory roles that maybe don’t fit the classic idea of a theat...
Read

A crowd simulation plugin used in the development of Channel 4’s Electric Dreams and an upcoming show with Amazon Prime.
Read
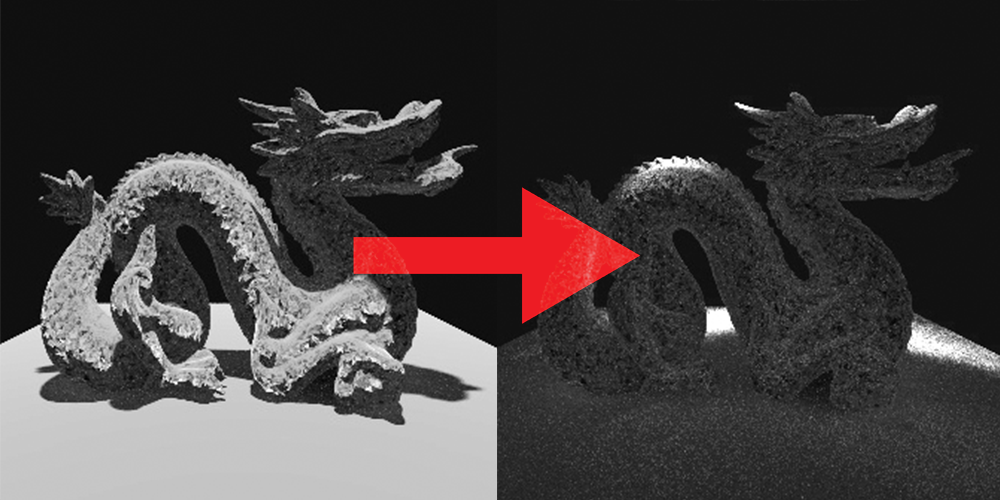
3rd year undergraduate research project investigating the use of light fields as environment maps as an alternative to traditional spherical or cube maps.
Read

I ran a film workshop to produce a film that won a competition to be screened on the International Space Station!
Read